Note It is highly recommended to save your parameters to a file before updating your firmware.
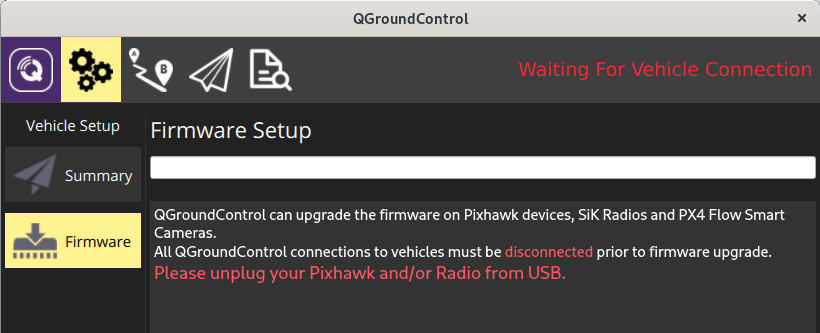
Open QGroundControl and navigate to the Firmware tab of the Vehicle Setup page.
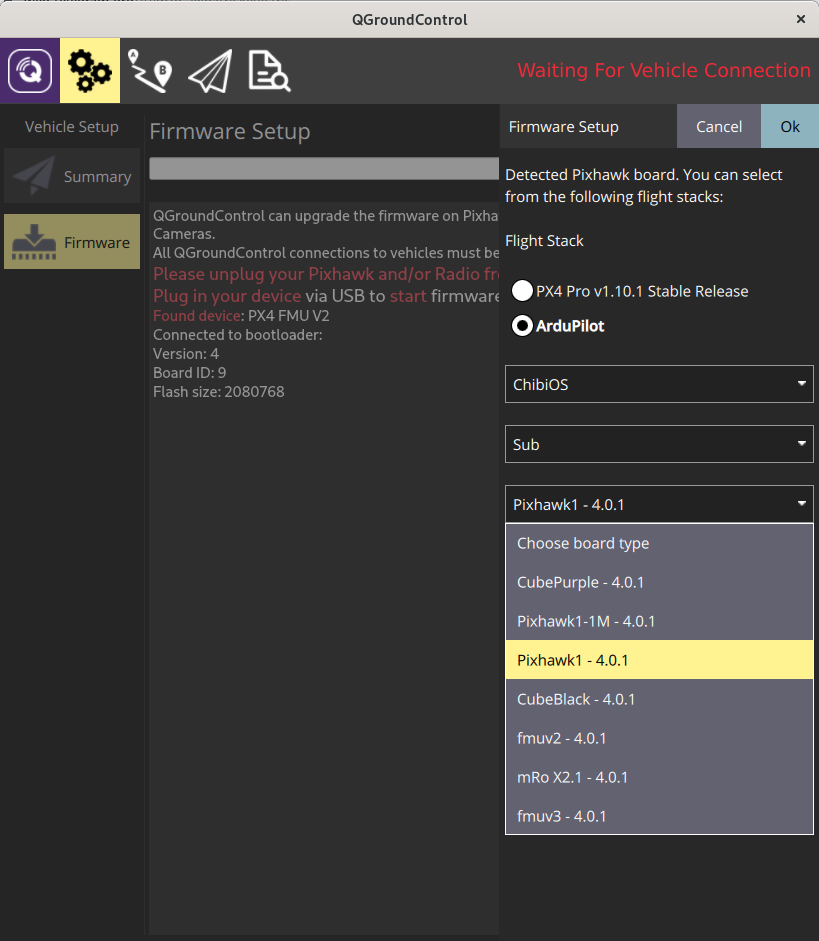
Plug in the Pixhawk to the computer’s USB port. Once detected, QGroundControl will show a firmware selection box on the right. Choose “ArduPilot Flight Stack”, then select “ChibiOS”, “Sub”, and (assuming you are using a Pixhawk) “Pixhawk1” from the dropdown list.
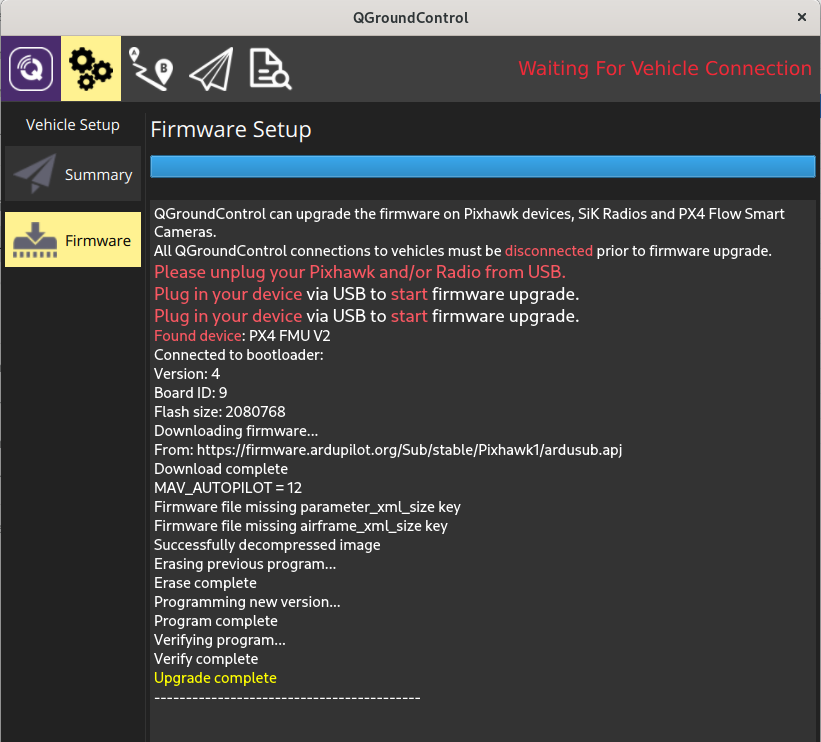
Press “OK” at the top right. The firmware will upload the Pixhawk and you’ll see the following printout and success message. The Pixhawk should start running and get detected by QGroundControl right away.
Raspberry Pi
The Raspberry Pi operating system and supporting software is installed by restoring a pre-configured .img file to the Raspberry Pi SD Card. The Raspberry Pi is referred to as the Companion Computer, and the software that runs on it is referred to collectively as the Companion Software.
Insert a microSD card with at least 4GB capacity into your computer with a card reader
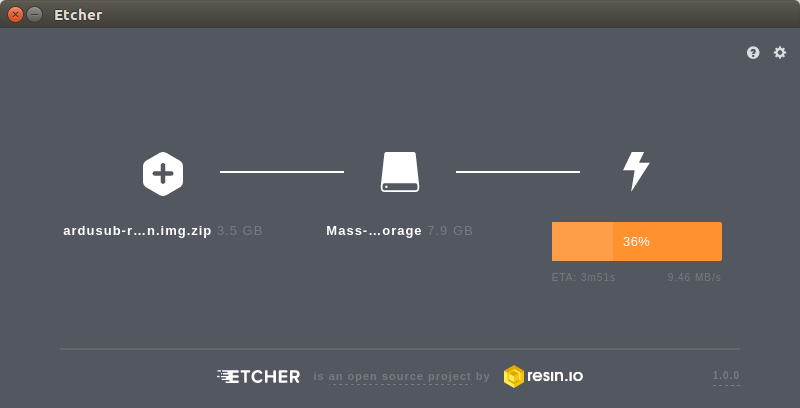
While the Raspberry Pi image downloads, download and install Etcher. Make sure you select the correct download for your Operating System!
Open Etcher, select the Raspberry Pi image file (no need to extract beforehand) and your SD card, click ‘Flash’ and wait for it to complete
Eject the SD card, and place it back into the Raspberry Pi
Network Setup
The Companion Computer is assigned a static IP address of 192.168.2.2, and it expects the surface computer to have an IP address of 192.168.2.1. The network configuration on the surface computer needs to be set up before it can communicate with the ROV. Choose your operating system below to display the appropriate network setup instructions.