ardusub-gitbook
ArduSub Firmware
Versioning
There are three flavors of ArduSub firmware:
- Stable (4.0): The recommended build for most users.
- Development (4.1-dev): Development build, updated frequently. This build should only be used in practice by developers and advanced users. The versions for these builds are suffixed with -dev.
Precompiled ArduSub binaries are available here. Note Binaries are provided for many platforms, but only the Pixhawk 1 (PX4-v2 platform) is thoroughly tested and supported.
Release History
ArduSub release history is available here.
What Version is Installed?
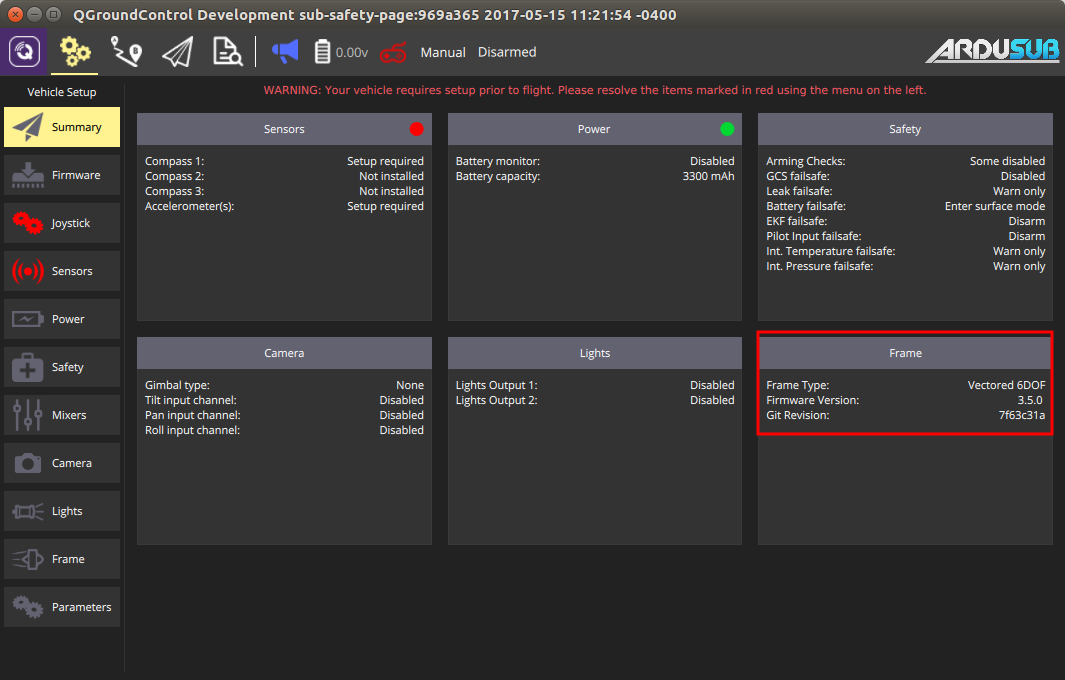
To find out what firmware version is installed on your autopilot, navigate to the Summary tab of the Vehicle Setup page. The firmware version will be listed under the Frame section.
Updating
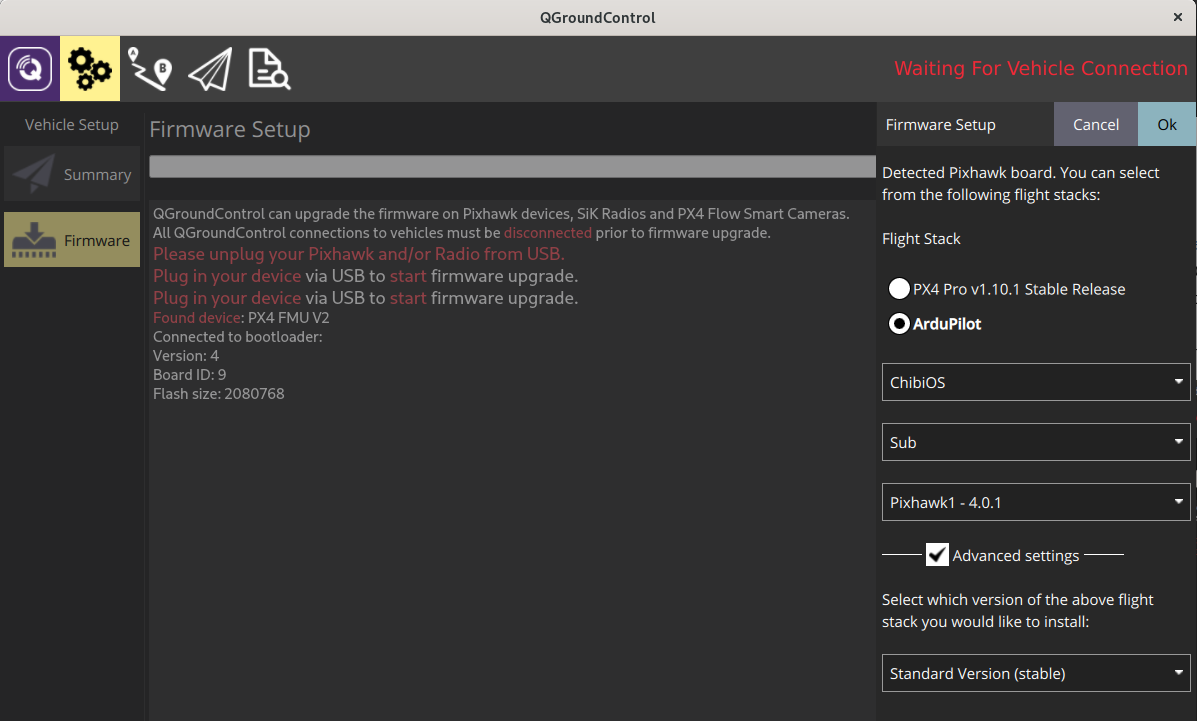
It is highly recommended to save your parameters to a file before updating your firmware. To update your firmware using QGroundControl, go to the Vehicle Setup Page and click the Firmware tab, then plug your autopilot into the computer with a USB cable. Choose ‘ArduPilot Flight Stack’, then choose your desired version to load. Beta and Development options are available after clicking the Advanced settings checkbox.
Sponsored by Blue Robotics. Code released under the GPLv3 License. Documentation released under the CC-NC-SA 4.0.
Submit a Documentation GitHub Issue here to report any errors, suggestions, or missing information in this documentation.
Submit an ArduSub GitHub Issue here to report issues with the ArduSub software.