⚠️ ARCHIVE NOTICE ⚠️
This documentation is no longer being maintained!
- The new ArduSub docs are located in the ArduPilot wiki. Updated pages will be redirected.
- The Companion Computer Software is also archived, and has been replaced by BlueOS.
- For Control Station Software, see QGroundControl or Cockpit (our new alternative).
Camera Mount Setup Page
The Camera Mount Setup Page allows for the configuration of an installed camera pan/tilt/roll mount.
On ROVs, the standard is for just a tilt mount as the vehicle can normally rotate easily. However, if pan and roll servos are installed, there are additional configuration options to set up these axis'.
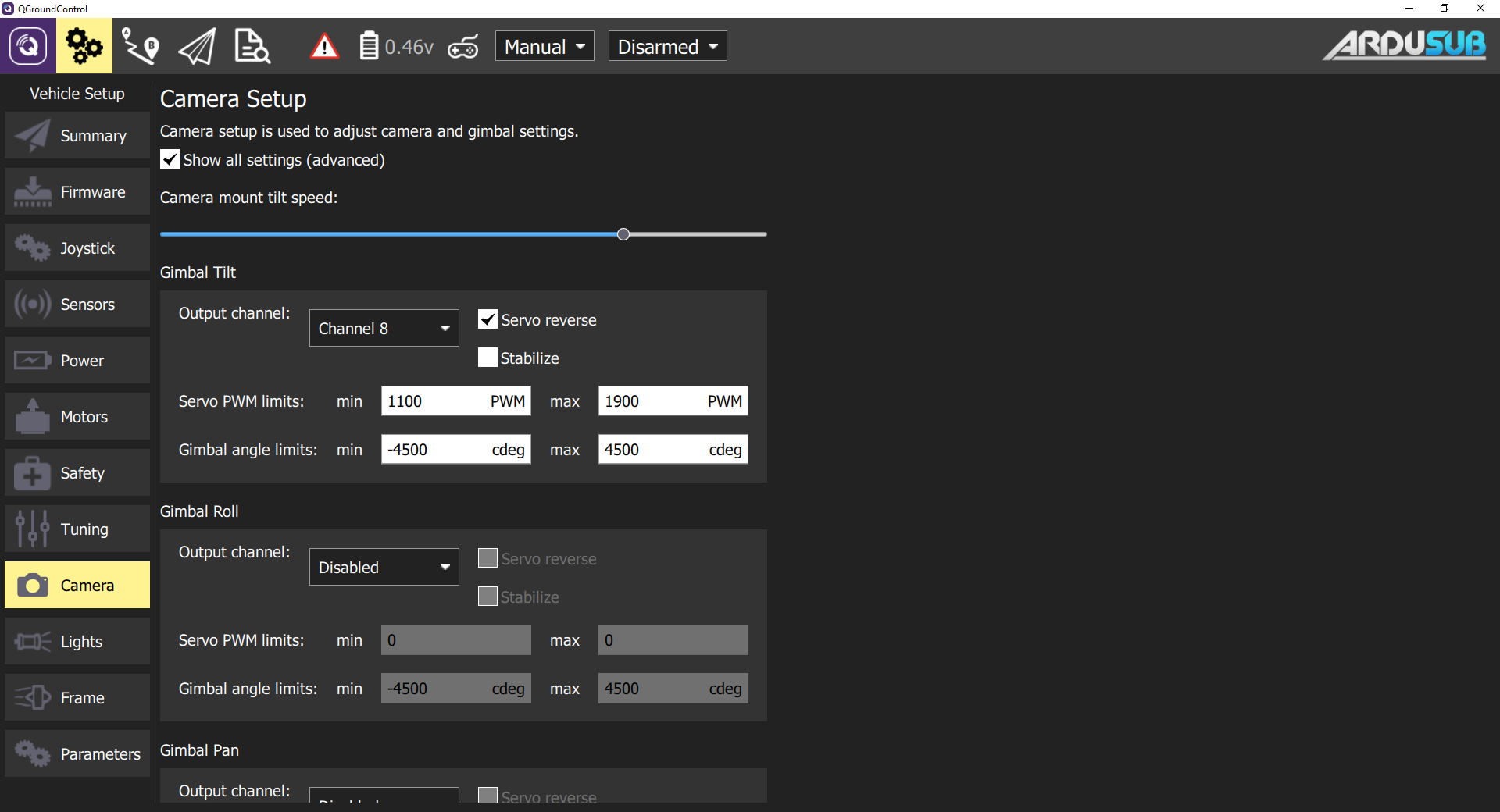
The options allow for: Output Channel: Select the appropriate output channel from the autopilot that the servo is plugged into. Servo Reverse: Reverses the mount movement. Stabilize: Enables auto-stabilization of the camera based on the vehicle pitch angle. Servo PWM limits: Limits the PWM signal output to the servo. 1100 is the minimum, 1900 is the maximum. Gimbal angle limits: Limits the degrees of rotation.
Gimbal Settings
These settings allow for different types of gimbals to be used.
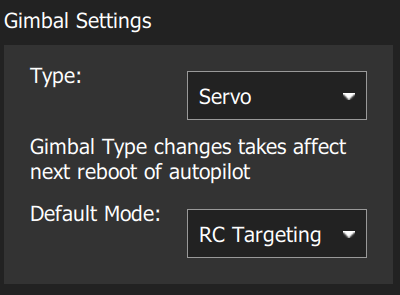
Type: None | Servo (Default) | 3DR Solo | Alexmos Serial | SToRM32 MAVLink | SToRM32 Serial
Default Mode: Retracted | Neutral | MAVLink Targeting | RC Targeting (Default) | GPS Point