⚠️ ARCHIVE NOTICE ⚠️
This documentation is no longer being maintained!
- The new ArduSub docs are located in the ArduPilot wiki. Updated pages will be redirected.
- The Companion Computer Software is also archived, and has been replaced by BlueOS.
- For Control Station Software, see QGroundControl or Cockpit (our new alternative).
Motors Setup Page
The direction that the motors will spin depends on how the vehicle and motors were assembled, so each motor's forward/reverse direction must be configured in software.
To begin, navigate to the Motors tab in the sidebar on the left, then proceed with the automatic (recommended) or manual configuration.
Be sure to keep all body parts and clothing clear of thrusters while the vehicle is armed.
Warning DO NOT run thrusters for longer than 30 seconds in air or you will wear out the plastic bearings.
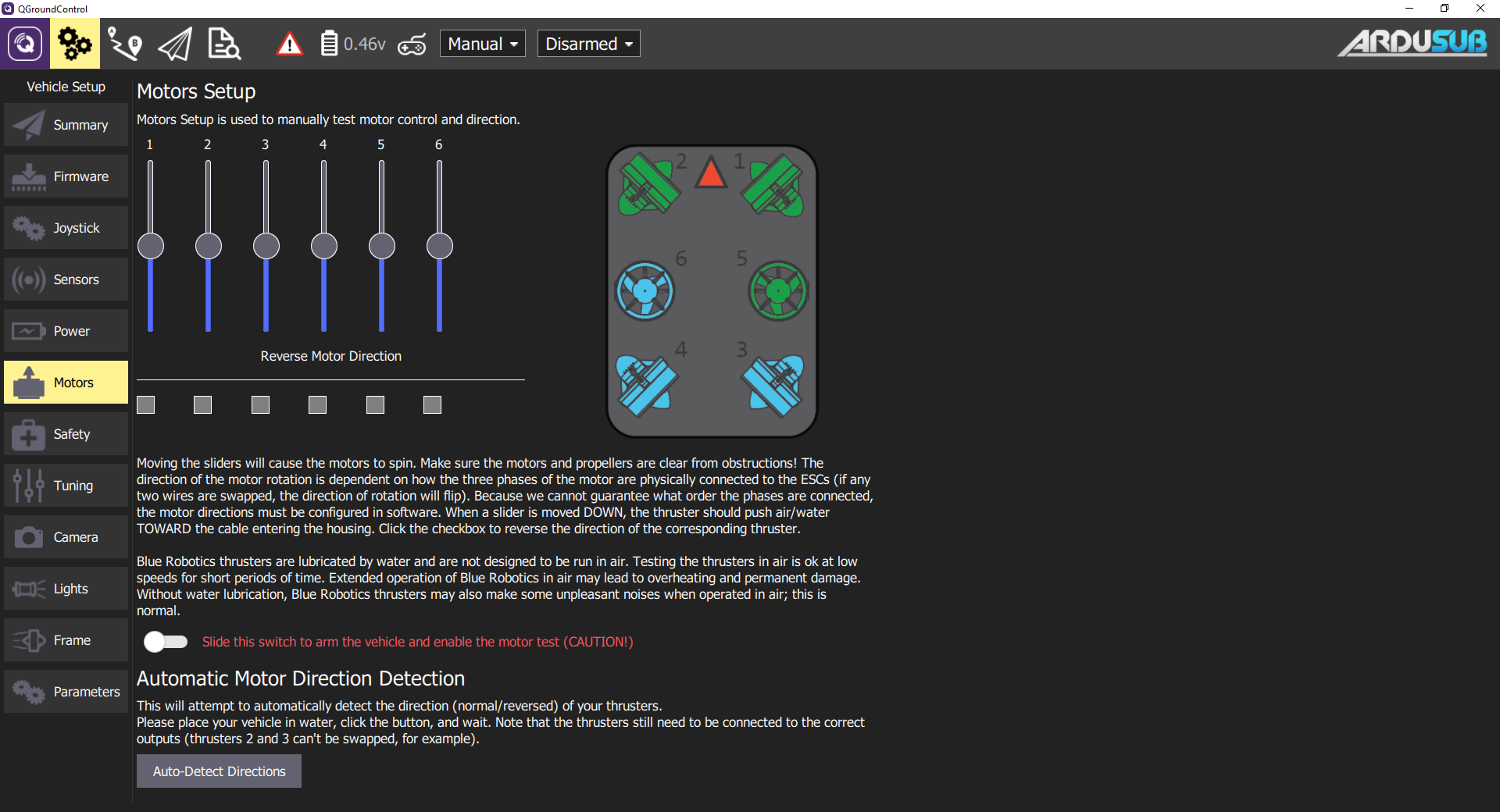
Manual Motor Direction Setup
- Go to the Motors tab in the sidebar on the left.
- Read and understand the instructions on the setup page.
- Arm the vehicle by clicking the switch on the page.
- One at a time, move each slider, and make sure that the motor that spins is pushing air as described in the instructions on the Motor Setup page. If a motor is spinning in the wrong direction, click the corresponding checkbox under the 'Reverse Motor Direction' section to correct the motor rotation.
- When you are finished with the setup, disarm the vehicle by clicking the switch.
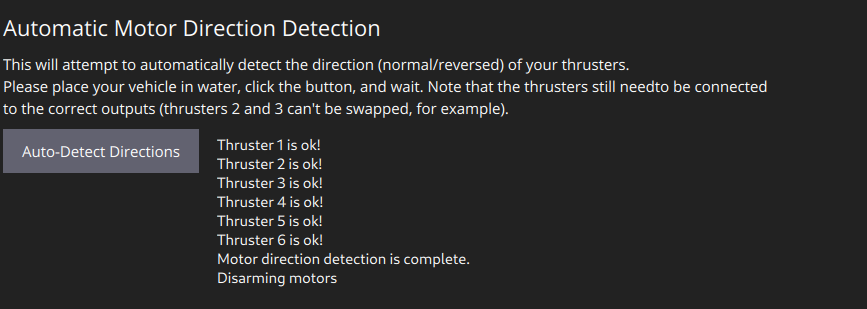
Automatic Motor Direction Detection Setup
- Adjust the vehicle's buoyancy to be neutral or slightly positive.
- Place the vehicle in water with enough room for it to move around slightly without bumping into walls or the bottom. Make sure the vehicle has a bit of slack in the tether so that it can move freely.
- Go to the Motors tab in the sidebar on the left.
- Click the Auto-Detect Directions button, and wait while the vehicle does it's motor direction detection routine.
- The results of the routine will appear as the routine progresses, and success or failure will be indicated. If the routine failed, you may try again, or configure the motor directions manually.