⚠️ ARCHIVE NOTICE ⚠️
This documentation is no longer being maintained!
- The new ArduSub docs are located in the ArduPilot wiki. Updated pages will be redirected.
- The Companion Computer Software is also archived, and has been replaced by BlueOS.
- For Control Station Software, see QGroundControl or Cockpit (our new alternative).
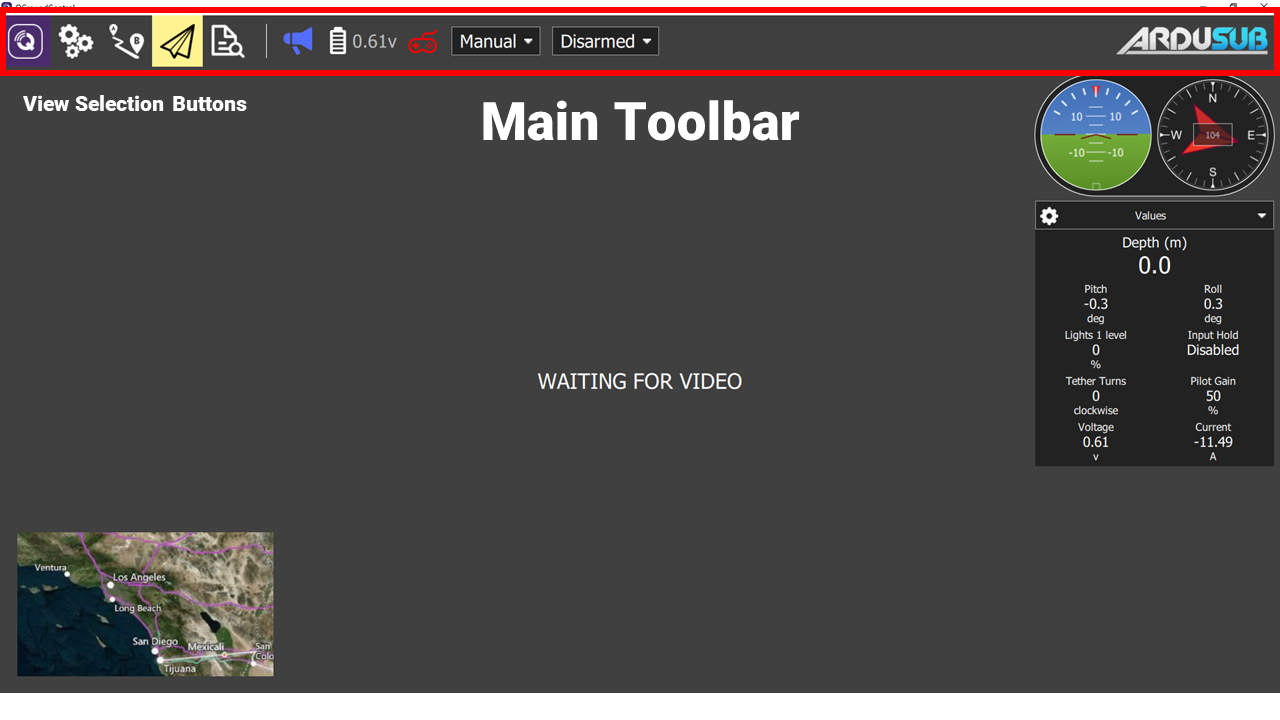
QGroundControl Features and Configuration
QGroundControl (QGC) is the Graphical User Interface (GUI) for ArduSub, which provides setup and control functionality. It is installed on the Topside Computer.
QGC has been designed to configure and fly many different types of vehicles (copters, planes, rovers, boats, subs) and firmware types (ArduPilot and PX4).
When an autopilot board with ArduSub firmware is connected, the default QGC interface changes to a customized one for ArduSub vehicles. A few pages on the Vehicle Setup View are different from other ArduPilot vehicle types and any setting or section labeled "PX4 Only" will not apply.
The QGroundControl User Guide is the official documentation for the project, however ArduSub vehicles introduce different settings and functions which are covered in more detail in this documentation.
Quick Start
- Download and install QGroundControl for your operating system.
- Start QGroundControl.
- Turn on and connect an ArduSub vehicle. If using a Companion Computer, the Network Settings will need to be configured. QGroundControl should detect the vehicle and connect to it automatically.
Organization
QGC is organized with the following sections and views: